Precision Localization and Tracking with Integrated GNSS and 3D Map Technology
Introduction
Accurate localization and tracking are essential for various industries, including transportation, logistics, autonomous vehicles, and urban infrastructure. In environments like dense urban areas, forests, or indoor spaces, traditional Global Navigation Satellite Systems (GNSS) often fall short due to signal obstructions and multipath errors. Our patented system leverages a combination of GNSS location estimates, satellite Signal-to-Noise Ratio (SNR) data, and 3D maps to deliver highly accurate localization and tracking, even in challenging environments. This innovative approach ensures that location data is precise, reliable, and adaptable to dynamic surroundings, making it a valuable asset across a range of applications.
The Challenge of Inconsistent GNSS Accuracy
While GNSS technologies are widely used in applications such as navigation, autonomous driving, and asset tracking, they face significant limitations in environments where satellite signals are obstructed or reflected. For example, in urban canyons or densely forested areas, GNSS signals may bounce off buildings or trees, leading to inaccurate positioning data. This creates challenges for industries that rely on precise location information, particularly those involved in logistics, autonomous systems, and smart infrastructure planning.
Existing GNSS systems often struggle to provide reliable data in these situations, resulting in performance inconsistencies, missed deadlines, or even safety risks. For businesses and organizations that rely on pinpoint accuracy, an advanced solution is required to improve the precision and reliability of their localization efforts.
An Advanced Approach to Localization and Tracking
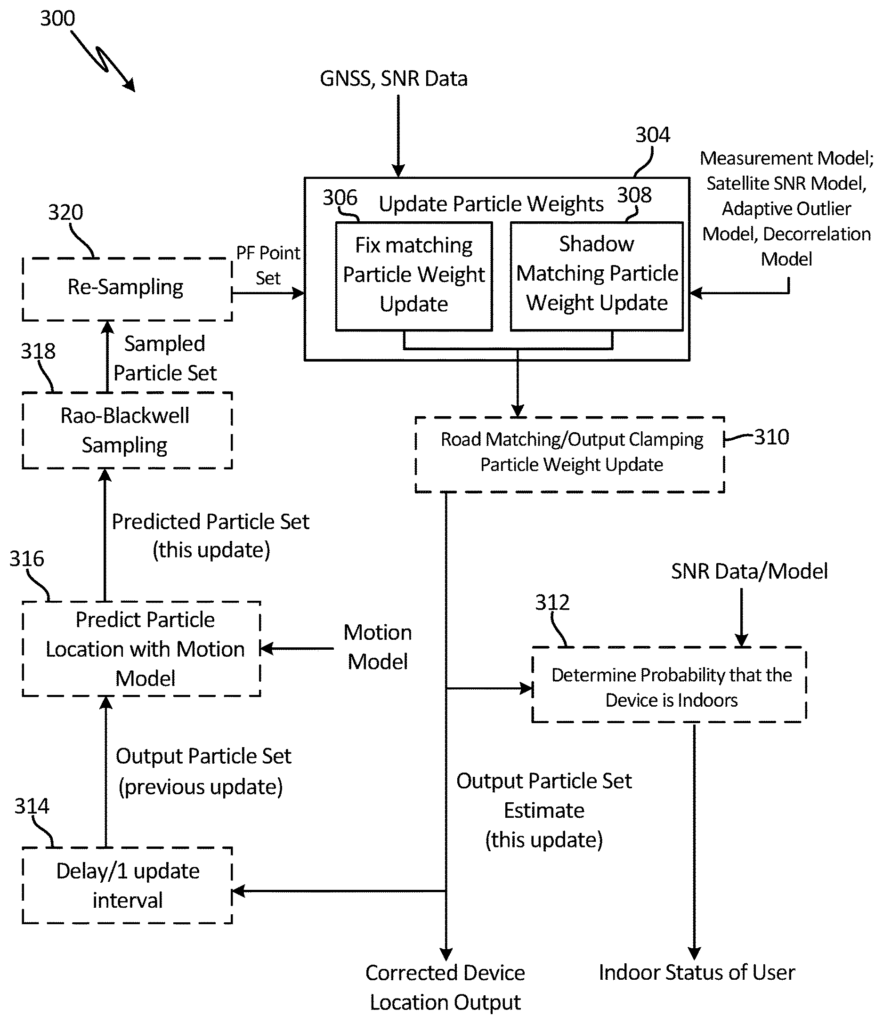
Our patented system combines GNSS location estimates with satellite SNR data and 3D mapping technology to deliver unparalleled precision in localization and tracking. By incorporating satellite signal strength and 3D environmental data into the positioning algorithm, this system can filter out erroneous signals caused by obstructions and reflections, providing accurate location estimates even in dense urban or natural environments. This integrated approach offers robust localization that significantly improves the reliability of GNSS-based tracking systems.
This technology is particularly valuable for industries like autonomous vehicles, where precise navigation is critical for safety and performance. It can also be applied to logistics and supply chain management, enabling more efficient tracking of assets and goods, or in urban planning, where accurate localization data supports the development of smart cities and infrastructure optimization.
Key Benefits
- Enhanced Accuracy: Combines GNSS, satellite SNR, and 3D map data to provide highly accurate location estimates, even in challenging environments.
- Reliable Performance: Reduces the impact of signal obstructions and reflections, improving the reliability of GNSS-based tracking systems.
- Broad Applicability: Ideal for autonomous vehicles, logistics, smart city development, and more.
- Scalable Integration: Can be incorporated into existing navigation systems, making it a versatile solution across industries.
Unlocking New Potential for Precision Navigation
Licensing this localization and tracking technology offers companies in geospatial services, autonomous vehicles, and smart infrastructure a cutting-edge tool to improve the accuracy and reliability of their location-based applications. This system provides a key advantage in environments where traditional GNSS systems struggle, ensuring greater performance and safety across a range of industries.
- Abstract
- Claims
The invention claimed is:
1. A method of determining location of a user device, the method comprising:
7. The method of claim 6, further including:
9. The method of claim 1, further comprising:
10. The method of claim 9, further comprising:
11. The method of claim 2, further comprising:
Share
Title
System and method for localization and tracking using GNSS location estimates, satellite SNR data and 3D maps
Inventor(s)
Andrew Irish, Jason Isaacs, Upamanyu Madhow
Assignee(s)
University of California
Patent #
10656282
Patent Date
May 19, 2020